Reza Iraji
University of Colorado Boulder
Research
Reseach Interests
- System Verification
- Cyber-physical systems
- Hybrid systems
- Robotics
- Artificial Intelligence
Data Modeling
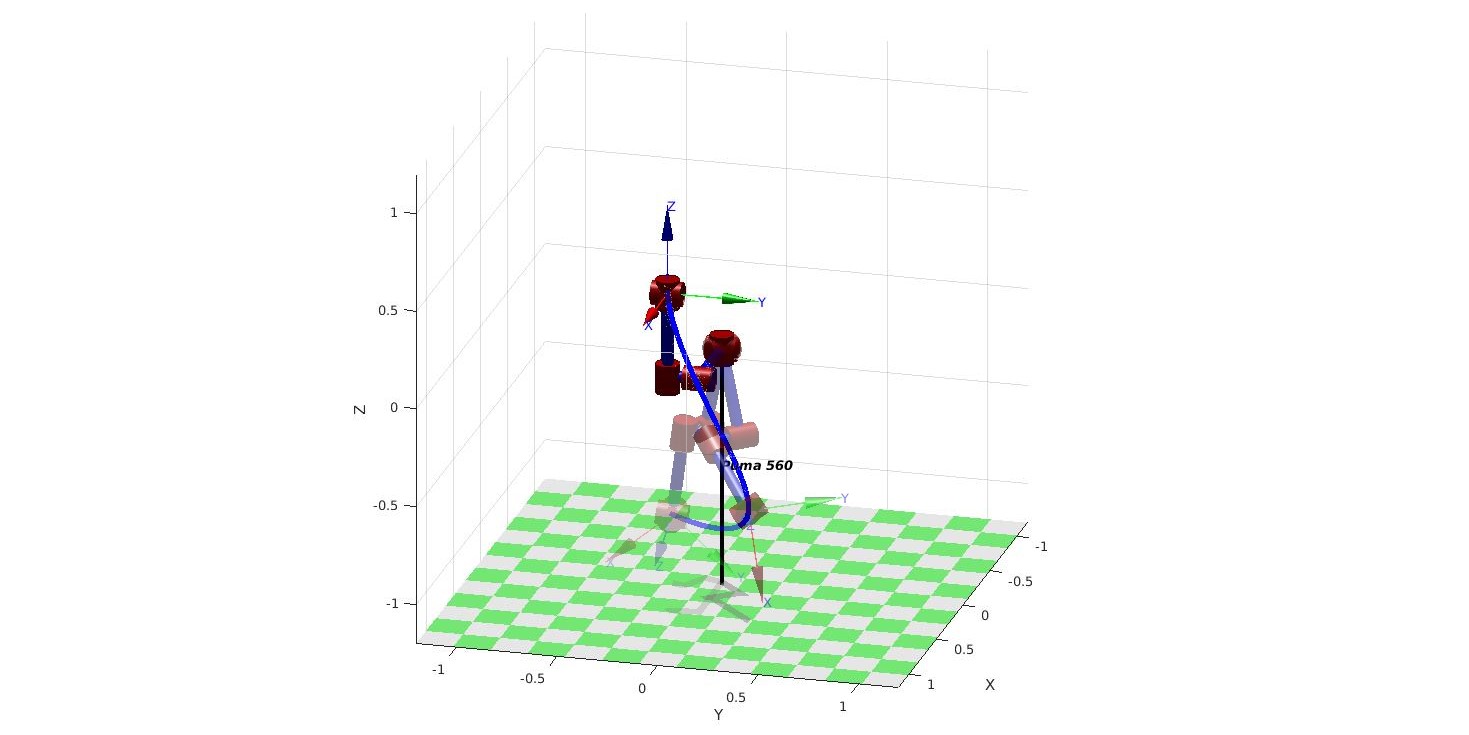
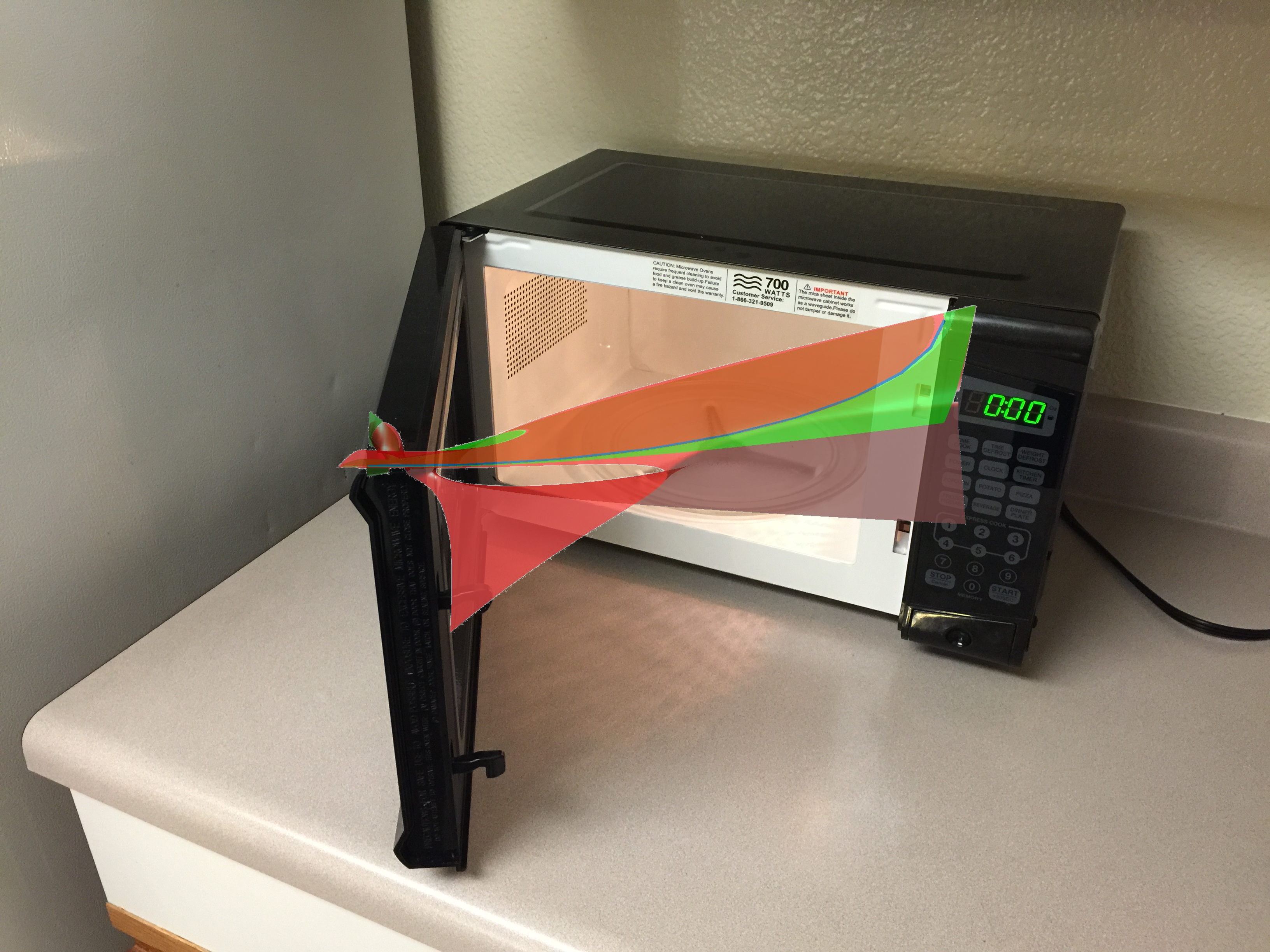
In this research, we introduced a novel computational framework, Principal Variety Analysis (PVA), for primarily nonlinear data modeling. PVA accommodates algebraic sets as the target subspace through which limitations of other existing approaches is dealt with. PVA power is demonstrated in many experiments in this research for learning kinematics of objects, as an important application. PVA takes recorded coordinates of some pre-specified features on the objects as input and outputs a lowest dimensional variety on which the feature coordinates jointly lie. Unlike existing object modeling methods, which require entire trajectories of objects, PVA requires much less information and provides more flexible and generalizable models, namely an analytical algebraic kinematic model of the objects, even in unstructured, uncertain environments. Moreover, it is not restricted to predetermined model templates and is capable of extracting much more general types of models. Besides finding the kinematic model of objects, PVA can be a powerful tool to estimate their corresponding degrees of freedom. PVA computational success depends on exploiting sparsity, in particular algebraic dimension minimization through replacement of intractable ℓ0 norm (rank) with tractable ℓ1 norm (nuclear norm). Complete characterization of the assumptions under which ℓ0 and ℓ1 norm minimizations yield virtually the same outcome is introduced as an important open problem in this research.
MATLAB Code: PVA 0.1.0
Roadmap Approximation

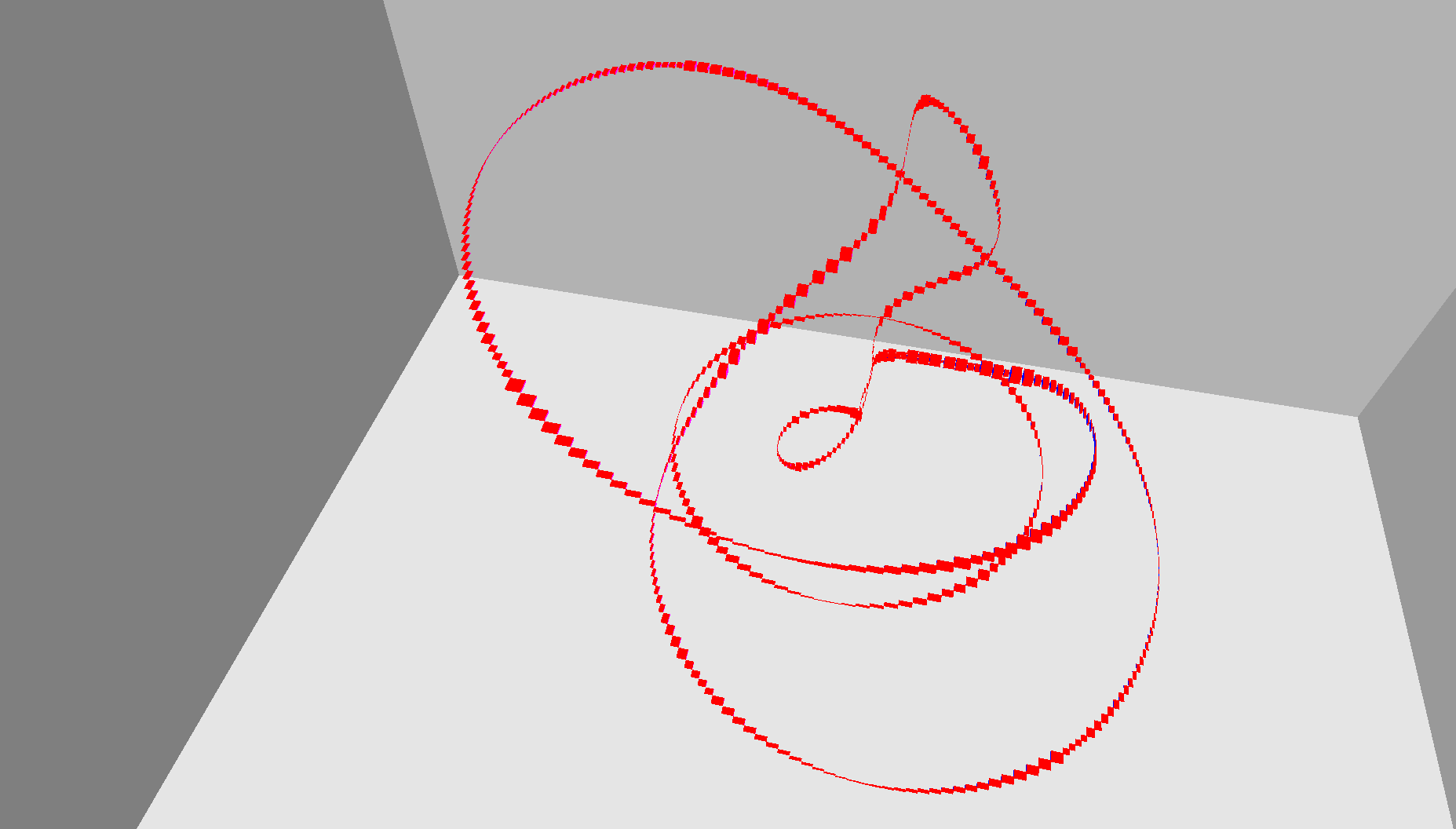
Motion planning has been studied for nearly four decades now. Complete, combinatorial motion planning approaches are theoretically well-rooted with completeness guarantees but they are hard to implement. Sampling-based and heuristic methods are easy to implement and quite simple to customize but they lack completeness guarantees. Can the best of both worlds be ever achieved, particularly for mission critical applications such as robotic surgery, space explorations, and handling hazardous material? In this research, we answered affirmatively to that question. We presented a new methodology, NUROA, to numerically approximate the Canny's roadmap, which is a network of one-dimensional algebraic curves. Our algorithm encloses the roadmap with a chain of tiny boxes each of which contains a piece of the roadmap and whose connectivity captures the roadmap connectivity. It starts by enclosing the entire space with a box. In each iteration, remaining boxes are shrunk on all sides and then split into smaller sized boxes. Those boxes that are empty are detected in the shrink phase and removed. The algorithm terminates when all remaining boxes are smaller than a resolution that can be either given as input or automatically computed using root separation lower bounds. Shrink operation is cast as a polynomial optimization with semialgebraic constraints, which is in turn transformed into a (series of) semidefinite programs (SDP) using the Lasserre's approach. NUROA's success is due to fast SDP solvers. NUROA correctly captured the connectivity of multiple curves/skeletons whereas competitors such as IBEX and Realpaver failed in some cases. Since boxes are independent from one another, NUROA can be parallelized particularly on GPUs.
Software Tool: NUROA 0.1.0